This site uses cookies to improve your experience. To help us insure we adhere to various privacy regulations, please select your country/region of residence. If you do not select a country, we will assume you are from the United States. Select your Cookie Settings or view our Privacy Policy and Terms of Use.
Cookie Settings
Cookies and similar technologies are used on this website for proper function of the website, for tracking performance analytics and for marketing purposes. We and some of our third-party providers may use cookie data for various purposes. Please review the cookie settings below and choose your preference.
Used for the proper function of the website
Used for monitoring website traffic and interactions
Cookie Settings
Cookies and similar technologies are used on this website for proper function of the website, for tracking performance analytics and for marketing purposes. We and some of our third-party providers may use cookie data for various purposes. Please review the cookie settings below and choose your preference.
Strictly Necessary: Used for the proper function of the website
Performance/Analytics: Used for monitoring website traffic and interactions
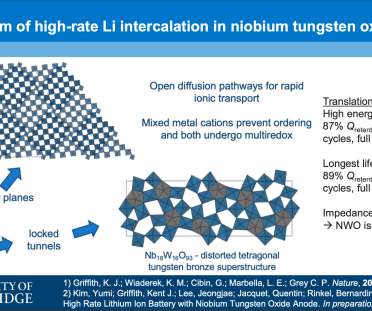
Niobium consumption is driven by GDP but also by the regulatory environment as microalloying enhances construction safety. As one of the indications of industry interest in the potential for niobium and batteries, the topic of the Charles Hatchett Award Seminar 2019 was the opportunity for niobium in batteries. Griffith et al.
As vehicle connectivity and advanced assistance systems become a ubiquitous part of driving, researchers at Volkswagen Group’s Electronics Research Laboratory ( ERL ) are working to create a “perfect driving experience” by enabling more intuitive forms of communications between the driver, the car and the external environment.
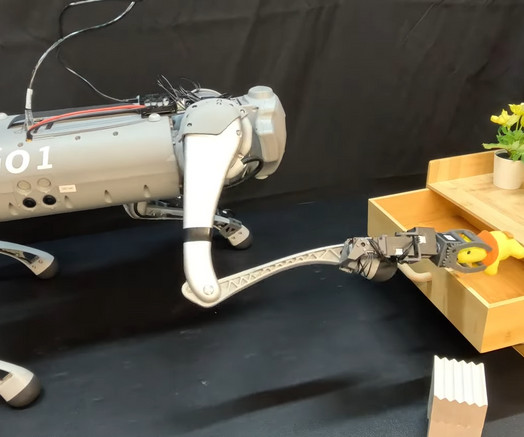
Although the use of robotics is widespread in logistics, few solutions offer the capability to efficiently transport payloads both in controlled and unstructured environments. Four-legged robots are ideal for navigating any environment a human can, yet few have the features to autonomously move payloads. This is where LEVA shines.
A few weeks ago, the company demonstrated the SARTRE project (Safe Road Trains for the Environment), which focuses on platooning in highway and motorway traffic at speeds of up to 90 km/h (56 mph). The low-speed traffic jam assistance system is the second technology for autonomous driving recently presented by Volvo Car Corporation.
Under the agreement, Volvo Cars and CATARC will work together and share know-how in three key areas: safety, environment, and well-being (cabin air quality solutions), thereby taking into account the environmental situation, traffic conditions and consumer demands in China.
Demonstrated for the first time in North America at TASS, Toyota’s advanced SPAD LIDAR environment mapping and recognition system is a key advancement toward the deployment of automated driving technology. Toyota plans to market technologies based on the AHDA advanced driving support system in the mid-decade.
Meaning, it needs to be able to perform a collection of tasks in practically any environment. Then we help the robot perceive its surroundings, understand its surroundings, then reason a best course of action to navigate its environment and accomplish its task. ICRA 2021 ] CMU RI Seminars are back! CMU RI Seminar ].
Recalling my astronomy lessons with my grandfather, I realized that many aspects of this process have intriguing similarities to what happens during a supernova: a sudden explosion, an expanding cloud of plasma debris, and a shock wave that slams into a thin hydrogen environment. Interstellar material consists mostly of hydrogen.)
This week’s GRASP on Robotics seminar is from Katherine Kuchenbecker at the Max Planck Institute for Intelligent Systems, on haptics and physical human-robot interaction. “A This Lockheed Martin Robotics Seminar is from Xuesu Xiao from The Everyday Robot Project at X, on Deployable Robots that Learn. Drone Days ].
VoA made the announcement at the Management Briefing Seminar, hosted by the Center for Automotive Research. —Oliver Schmidt, general manager, Environment and Engineering Office, Volkswagen Group of America. 3Degrees and carbon offsets.
In this work, we present LocoMan, a dexterous quadrupedal robot with a novel morphology to perform versatile manipulation in diverse constrained environments. Boston Dynamics ] Here’s some video of Field AI’s robots operating in relatively complex and unstructured environments without prior maps. CMU ] Thanks, Changyi!
Toyota established the annual program in 2000 in commemoration of Toyota’s receipt of the Global 500 Award in 1999 from the United Nations Environment Programme (UNEP); this year marks the program’s 18 th year. Environment-Education seminar of Energy in Yokkaichi University. Toki-no-hane (feather of Japanese crested ibis)'.
JPL ] Cassie Blue showcases its ability to navigate a moving walkway, a common yet challenging scenario in human environments. It can be also steered to navigate through a cluttered environment with obstacles. The seminar will review a series of robotic systems built at the Johnson Space Center over the last 20 years.
A major challenge in bringing these controllers to life is the “reality gap” between the real platform and the training environment. HEBI Robotics ] Menteebot can navigate complex environments by combining a 3D model of the world with a dynamic obstacle map. SNU INRoL ] I think someone needs to crank the humor setting up on this one.
the Environment. Austin and San Antonio region; and hold training seminars regarding multifamily housing and workplace electric vehicle charging. The California Fleets and Workplace Alternative Fuels Project is a statewide. effort to develop templates and best practices for permitting AFV refueling. petroleum reduction strategies.
Flexiv ] How can we ensure robots using foundation models, such as large language models (LLMs), wont hallucinate when executing tasks in complex, previously unseen environments? Wing ] This CMU RI Seminar is from Sangbae Kim, who was until very recently at MIT but is now the Robotics Architect at Metas Robotics Studio. [ CMU RI ]
Dr. Shimul (Md Mazharul) Haque, from QUT’s School of Civil Engineering and Built Environment and Centre for Accident Research & Road Safety – Queensland (. ), presented the findings at a Driving Distraction Seminar held at QUT. The study is published in Transportation Research Part C: Emerging Technologies.
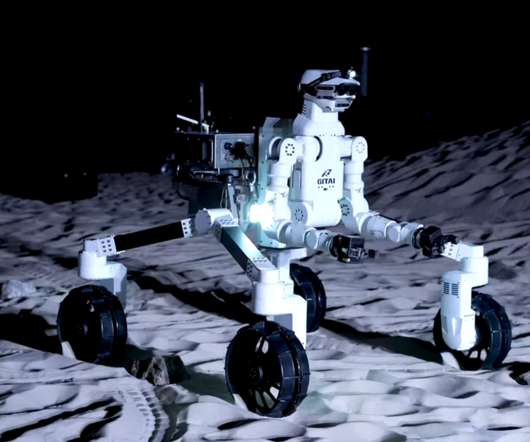
In December of 2021 at the mock lunar surface environment in JAXA’s Sagamihara Campus, the GITAI lunar robotic rover R1 conducted numerous tasks and mobility operations, successfully completing all planned tests. This is cool looking, but I'd need to know more about how this system can deal with an actual lunar environment, right?
Highway Pilot Connect uses this for a constant exchange of information with other trucks and the environment. A similar seminar will be arranged by Volvo Trucks in Brussels. EU Truck Platooning Challenge is an initiative of the Ministry of Infrastructure and the Environment within the framework of the EU presidency.
Inspired by the adaptable nature of organic brains, researchers from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) have introduced a method for robust flight navigation agents to master vision-based fly-to-target tasks in intricate, unfamiliar environments. There isn’t one way to build a Mobot!
Michigan Robotics ] This Microsoft Future Leaders in Robotics and AI Seminar is from Catie Cuan at Stanford, on “Choreorobotics: Teaching Robots How to Dance with Humans.” Because, look, a couple seconds of muted audio underneath a voiceover is in fact not really answering the question.
In these environments, resistance to factors like high humidity and working underwater is essential. Presented at the 2024 Conference on Robot Learning in Munich, this platform introduces autonomous aerial manipulation that works in both indoor and outdoor environments—without relying on costly off-board tracking systems.
Sue Cischke, Ford group vice president, Sustainability, Environment and Safety Engineering, pointed to the “ key role ” government policies such as fuel standards and greenhouse gas emission regulations, play in the development and support of Ford’s product and technology pathways.
DARPA’s Robotic Autonomy in Complex Environments with Resiliency (RACER) program recently conducted its third experiment to assess the performance of off-road unmanned vehicles. Naver Labs ] This seminar is from Matt Zucker at Swarthmore College, on “Robotics education and research at a liberal arts college.”
His four-legged and wheeled robot is able to change shape within seconds, overcome steps and navigate between indoor and outdoor environments. Paper ] Join Jonathan Gammell with our guest speaker Dr. Larry Matthies, NASA JPL, discussing In situ mobility for Planetary Exploration in our third seminar of our Anniversary series. [
DLR ] This Carnegie Mellon University Robotics Institute seminar, by Kim Baraka at Vrije Universiteit Amsterdam, is on the topic “Why We Should Build Robot Apprentices and Why We Shouldn’t Do It Alone.”
Current robotic systems focus on avoiding unexpected contact, often relying on strategically placed environment sensors. MIT CSAIL ] This UPenn GRASP SFI Seminar is by E Farrell Helbling at Cornell, on Autonomy for Insect Scale Robots. Paper ] Thanks Samarth! Meet CSAIL’s machine friends. [
The almost noise-free prototype can trap objects underneath its body without physical contact, thereby enabling safe interactions in delicate environments such as coral reefs. Nina Lanza and her team tested autonomous drones in the frigid environment that is similar to Mars.
Paper ] via [ ETH RSL ] Aerial robots can enhance their safe and agile navigation in complex and cluttered environments by efficiently exploiting the information collected during a given task. UPenn ] This week's CMU RI Seminar is by Jessica Burgner-Kahrs from University of Toronto, Mississauga, on continuum robots. [ CMU RI ].
This paper presents a novel strategy for autonomous teamed exploration of subterranean environments using legged and aerial robots. GitHub ] Two excellent seminars from the UofT Robotics Instutie, featuring Henny Admoni from CMU and Dorsa Sadigh from Stanford. www.youtube.com.
These robotic units called RoboSalps, after their animal namesakes, have been engineered to operate in unknown and extreme environments such as extra-terrestrial oceans. Waymo ] This week’s CMU RI Seminar is from Russ Tedrake, on “Motion Planning Around Obstacles with Graphs of Convex Sets.” [ CMU ]
That’s why we’ve built out a huge resource section with tons of articles and that’s why we’ve begun offering seminars and classes. We want to empower consumers and help them get ahead in the most economical way possible,&# continued Deri. After all, I’m the Solangelist and I have a movement to lead.
Through consultations and seminars on battery technology, insights and development directions will be discussed, alongside a consultative body that will be formed regularly to share information on global battery industry trends and results.
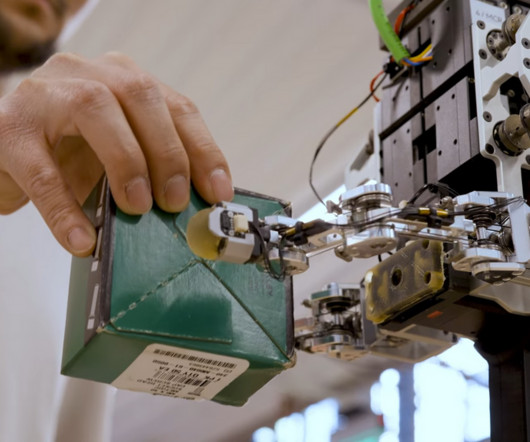
The robots are equipped with a suite of sensors and cameras which are constantly understanding the environment around them. Stanford HAI ] This Maryland Robotics Center seminar is from UC Berkeley’s Hannah Stuart, on “Embodying Dexterity: Contact models for the design of robotic grasping and manipulation.”
ARPL NYU ] Human environments are filled with large open spaces that are separated by structures like walls, facades, glass windows, etc. ICRA 2021 ] This week's Lockheed Martin Robotics Seminar features Henrik Christensen on "Deploying autonomous vehicles for micro-mobility on a university campus." [ UMD ] Kodiak ] Thanks Kylee!
GITAI ] This Maryland Robotics Center seminar is from CMU’s Vickie Webster-Wood: “It’s Alive! Such robotic systems have future applications in medicine, search and rescue, and environmental monitoring of sensitive environments (e.g., MRS CTU ] GITAI has a fancy new office in Los Angeles that they’re filling with space robots.
This week's CMU RI Seminar is from Chelsea Finn at Stanford, entitled "Robots Should Reduce, Reuse, and Recycle.". Despite numerous successes in deep robotic learning over the past decade, the generalization and versatility of robots across environments and tasks has remained a major challenge.
Volvo Trucks has been running a series of ‘Fuelwatch’ seminars around the UK, with customers turning out in droves anxious to get a grip on their motoring finances. The seminar was very good, very interesting, and we’re setting up a more in-depth meeting.”. The programme, which began in May, was originally scheduled to end in November.
What are the challenges remaining to get us to truly autonomous vehicles in any environment, and what are the important distinctions for military use as compared to consumer use? NASA ] [ Leaders in Lidar Chapter 1 , Chapter 2 ] This CMU RI Seminar comes from Sarcos COO Jorgen Pedersen, on “RE2 Robotics: from RI spinout to Acquisition.”
Cybathlon ] Robots can not perform reactive manipulation and they mostly operate in open-loop while interacting with their environment. Consequently, the current manipulation algorithms either are very inefficient in performance or can only work in highly structured environments. CMU RI ]
It created an environment for students to make a sequence of nonfatal mistakes, so they could fail and develop self-confidence for navigating the risks and uncertainties of entrepreneurial life. The pair spent 18 months developing a security bracelet that used wireless signals to protect vulnerable people in dangerous work environments.
We organize all of the trending information in your field so you don't have to. Join 5,000+ users and stay up to date on the latest articles your peers are reading.
You know about us, now we want to get to know you!
Let's personalize your content
Let's get even more personalized
We recognize your account from another site in our network, please click 'Send Email' below to continue with verifying your account and setting a password.








































Let's personalize your content