This site uses cookies to improve your experience. To help us insure we adhere to various privacy regulations, please select your country/region of residence. If you do not select a country, we will assume you are from the United States. Select your Cookie Settings or view our Privacy Policy and Terms of Use.
Cookie Settings
Cookies and similar technologies are used on this website for proper function of the website, for tracking performance analytics and for marketing purposes. We and some of our third-party providers may use cookie data for various purposes. Please review the cookie settings below and choose your preference.
Used for the proper function of the website
Used for monitoring website traffic and interactions
Cookie Settings
Cookies and similar technologies are used on this website for proper function of the website, for tracking performance analytics and for marketing purposes. We and some of our third-party providers may use cookie data for various purposes. Please review the cookie settings below and choose your preference.
Strictly Necessary: Used for the proper function of the website
Performance/Analytics: Used for monitoring website traffic and interactions
As vehicle connectivity and advanced assistance systems become a ubiquitous part of driving, researchers at Volkswagen Group’s Electronics Research Laboratory ( ERL ) are working to create a “perfect driving experience” by enabling more intuitive forms of communications between the driver, the car and the external environment.
When active, the engine, brakes and steering respond automatically. A few weeks ago, the company demonstrated the SARTRE project (Safe Road Trains for the Environment), which focuses on platooning in highway and motorway traffic at speeds of up to 90 km/h (56 mph). Earlier post.). Earlier post.).
Recalling my astronomy lessons with my grandfather, I realized that many aspects of this process have intriguing similarities to what happens during a supernova: a sudden explosion, an expanding cloud of plasma debris, and a shock wave that slams into a thin hydrogen environment. Interstellar material consists mostly of hydrogen.)
Boston Dynamics ] Digit's engineered to be a multipurpose machine. Meaning, it needs to be able to perform a collection of tasks in practically any environment. Then we help the robot perceive its surroundings, understand its surroundings, then reason a best course of action to navigate its environment and accomplish its task.
VoA made the announcement at the Management Briefing Seminar, hosted by the Center for Automotive Research. —Oliver Schmidt, general manager, Environment and Engineering Office, Volkswagen Group of America. 3Degrees and carbon offsets.
JPL ] Cassie Blue showcases its ability to navigate a moving walkway, a common yet challenging scenario in human environments. PAL Robotics’ Kangaroo demonstrates classic “zero-moment point” or ZMP walking, with only one or two engineers tagging along, and neither of them look all that nervous. RAMIEL ] Thanks, Temma! That is all.
Sue Cischke, Ford group vice president, Sustainability, Environment and Safety Engineering, pointed to the “ key role ” government policies such as fuel standards and greenhouse gas emission regulations, play in the development and support of Ford’s product and technology pathways. annual increase.
A major challenge in bringing these controllers to life is the “reality gap” between the real platform and the training environment. HEBI Robotics ] Menteebot can navigate complex environments by combining a 3D model of the world with a dynamic obstacle map. SNU INRoL ] I think someone needs to crank the humor setting up on this one.
Dr. Shimul (Md Mazharul) Haque, from QUT’s School of Civil Engineering and Built Environment and Centre for Accident Research & Road Safety – Queensland (. ), presented the findings at a Driving Distraction Seminar held at QUT. The study is published in Transportation Research Part C: Emerging Technologies.
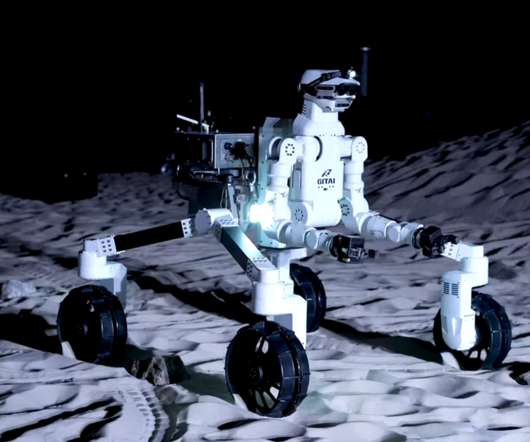
In December of 2021 at the mock lunar surface environment in JAXA’s Sagamihara Campus, the GITAI lunar robotic rover R1 conducted numerous tasks and mobility operations, successfully completing all planned tests. This is cool looking, but I'd need to know more about how this system can deal with an actual lunar environment, right?
In these environments, resistance to factors like high humidity and working underwater is essential. Presented at the 2024 Conference on Robot Learning in Munich, this platform introduces autonomous aerial manipulation that works in both indoor and outdoor environments—without relying on costly off-board tracking systems.
His four-legged and wheeled robot is able to change shape within seconds, overcome steps and navigate between indoor and outdoor environments. DFKI ] The Utah Bionic Leg, developed by University of Utah mechanical engineering associate professor Tommaso Lenzi and his team in the HGN Lab, is a motorized prosthetic for lower-limb amputees.
In a new study, engineers at the University of Colorado Boulder debuted mCLARI, a 2-centimeter-long modular robot that can passively change its shape to squeeze through narrow gaps in multiple directions. Current robotic systems focus on avoiding unexpected contact, often relying on strategically placed environment sensors.
Tokyo Tech ] MIT engineers have developed a telerobotic system to help surgeons quickly and remotely treat patients experiencing a stroke or aneurysm. LOVOT ] Meet Cassie, an electrical engineer at Boston Dynamics, as she answers real questions from kids and other curious minds—from how to start a career in robotics to Spot’s favorite color.
Paper ] via [ ETH RSL ] Aerial robots can enhance their safe and agile navigation in complex and cluttered environments by efficiently exploiting the information collected during a given task. UPenn ] This week's CMU RI Seminar is by Jessica Burgner-Kahrs from University of Toronto, Mississauga, on continuum robots. [ CMU RI ].
These robotic units called RoboSalps, after their animal namesakes, have been engineered to operate in unknown and extreme environments such as extra-terrestrial oceans. This panel will be moderated by Penn Engineering SEAS Dean Dr. Vijay Kumar. Discover how they are putting Stretch to work.
Looking to give robots a more nimble, human-like touch MIT engineers have now developed a gripper that grasps by reflex. The almost noise-free prototype can trap objects underneath its body without physical contact, thereby enabling safe interactions in delicate environments such as coral reefs. Enjoy today’s videos!
Pollen Robotics’ engineers developed new features including VR teleoperation compatibility and the Lidar technology to ensure robot safety. The robots are equipped with a suite of sensors and cameras which are constantly understanding the environment around them.
Flexiv ] A team of engineers has devised a modular system to produce efficient, scalable aquabots. What are the challenges remaining to get us to truly autonomous vehicles in any environment, and what are the important distinctions for military use as compared to consumer use? DARPA ] Leaders in Lidar | Chapter 3: Take the Next Steps.
Prototyped in 1975, this automated taxi-dispatch system was the brainchild of mechanical engineer Dwight Baumann and his students at Carnegie Mellon University. Indeed, the idea that universities are engines of innovation is so ingrained that we take it for granted that it was always the case. Are innovators born or made?
We organize all of the trending information in your field so you don't have to. Join 5,000+ users and stay up to date on the latest articles your peers are reading.
You know about us, now we want to get to know you!
Let's personalize your content
Let's get even more personalized
We recognize your account from another site in our network, please click 'Send Email' below to continue with verifying your account and setting a password.























Let's personalize your content