The Conversation (4)

The success of urban air mobility will hinge on the ability to build and operate multiple vertiports within and near cities. These would be places where passengers would embark and disembark, aircraft would be recharged, and communications facilities would send command-and-control data to the aircraft to guide them in a congested airspace.
James Provost
All over the world, startup companies, government agencies, universities, and airlines are collaborating to launch an entirely new category of aviation based on electric aircraft capable of both vertical takeoff and efficient horizontal flight. In metropolitan areas that struggle with traffic congestion, these aircraft would displace some car commuting and also some short-haul flights.
Realizing this vision will require new regulations and flight rules to ensure the safety of passengers flying in these small aircraft, in relatively close proximity, in all kinds of weather. This challenge is greatly complicated by several factors, notably that the aircraft themselves are novel and will eventually be flown autonomously. Nothing like this has ever been attempted on a large scale.
As part of a program to develop the needed flight rules and communications systems, we are leading a consortium of a dozen companies and universities, called the North Texas Cohort, that is operating an experimental air corridor north of Dallas, Texas. We carried out our first flight demonstration on 11 October 2022, when we flew a Bell 407GXi helicopter (supplied by consortium member Bell Textron) as a stand-in for a future electric vertical-takeoff-and-landing vehicle, or eVTOL.
We are part of a larger NASA program called the Advanced Air Mobility National Campaign, and our work is funded by NASA and other U.S. government agencies. Our air corridor is one of several such test facilities; similar ranges are operating in or planned for New York, Ohio, and North Carolina.
If this work succeeds, scores—perhaps hundreds—of eVTOLs will one day swarm over metropolitan areas during rush hours. They will be flying between specially designed stations called vertiports, as well as to airports and other transportation terminals, hospitals, and cargo depots. In so doing, they could reduce travel times and greenhouse-gas emissions.
Seven fundamental challenges must be solved
The eVTOLs are already being tested. The leading makers—Joby Aviation, Volocopter, Archer Aviation, Beta Technologies, Wisk Aero, and Lilium—have built scores of aircraft and have collectively flown them for thousands of hours. Indeed, some of the most highly funded startups, such as Joby, are now working out the details of how they will mass-produce the aircraft. Regulatory agencies, such as the European Union Aviation Safety Agency, are working with eVTOL startups to devise certification regimes for the new aircraft.
However, there are major challenges that go well beyond the eVTOLs themselves. A recent “blueprint” published by the National Academies Press and an article coauthored by us and several colleagues identified seven such problems:
- Engineers must create control systems advanced enough to permit ultrareliable autonomous flight;
- We’ll have to work out protocols to enable beyond-visual-line-of-sight communications;
- Aviation regulators need new systems of air-traffic control, called digital flight rules, to manage simultaneous flights into and out of the vertiports and other terminals;
- Industry and aviation regulators must develop traffic rules to guarantee safety in the air and on the ground;
- Standards organizations must devise flight protocols to ensure that the aircraft do not come dangerously close to one another. These rules will apply to all uncrewed aircraft—small, medium, and large drones, and fixed-wing and rotor aircraft;
- The operators of these eVTOLs will have to figure out how to guarantee the security and privacy of all communications to and from aircraft during the flight;
- Early operators of eVTOLs will encounter public resistance: When flying at relatively low altitudes, the aircraft will be audible on the ground. And many—probably most—prospective passengers will be leery of flying on an aircraft without a human pilot on board.
Our Texas-based group is focusing on three of these issues: autonomy, communications, and standards. Most of the eVTOLs being designed or flown now are intended to be flown by a pilot on board, at least for the first several years of commercial operation. However, for urban air mobility to be economically viable over the long term, autonomous flight will be necessary. So we, and others, are figuring out how such flights will be accomplished.
In brief, the eVTOL will be flown by a flight-control system, or autopilot, based on input from redundant onboard computers. These computers will receive command-and-control data from ground-control stations and from optical, infrared, and light detection and ranging (lidar) sensors on the aircraft. These sensors will detect other aircraft, birds, buildings, and thick clouds. By continually gathering and analyzing this data, the computers will gain situational awareness in the airspace.
For the high-demand routes to work, eVTOLs will need to be in constant contact with a traffic-management system.
The ground-control stations will be based at the vertiports, which will consist of clusters of helipads on rooftops equipped with the necessary infrastructure to recharge and service eVTOLs and let passengers embark and disembark. While in the air, the eVTOLs will sometimes receive updated flight instructions and rerouted flight paths. These updates will be prompted by all kinds of developments: sudden changes of weather; shifts in passenger loads at different vertiports, unforeseen no-fly zones due to public events on the ground, or accidents.
Suppose, for example, that a lightning strike or a collision with a large bird damages a rotor blade. The onboard computers would need to immediately determine whether it is safe to continue the flight. They would also have to communicate with passengers, understandably panicky in such a situation, as effectively as a human pilot would.
Continuous communications will be mandatory
Doing all this means executing multiple functions. Two of the most important are quickly assessing the health of a vehicle and effectively teaming a human on the ground with the computers on the eVTOL. Faculty from the Department of Materials Science and Engineering at the University of North Texas are developing flight-modeling and simulation strategies to assess the impact of structural failures on the flight performance. Similarly, engineers from Bell Textron are studying how a human pilot could team with an autopilot in an emergency.
Continuous and extremely reliable communications with the ground-control stations as well as with other vehicles in the airspace also present notable challenges. To understand why, consider the situations that eVTOLs are expected to encounter routinely. The aircraft will travel within designated “skylanes” over urban areas. During peak travel times, two or more aircraft will frequently find themselves trying to cross an intersection at the same time, or trying to enter a skylane in which there is heavy traffic. Also, constant communication will be needed to enable vehicles to maintain a safe distance from one another, to collaboratively sense obstacles, and to relay information from vehicle to vehicle when they are beyond line of sight from the ground-control stations.

In the coming years, many different kinds of aircraft will likely be sharing the air space near urban areas. To enable them all to do so safely will require vertical zones designated for certain classes of aircraft. These classes will include ones for urban air mobility (UAM) and also for personal air vehicles (PAV)—small vertical-takeoff aircraft designed to carry one or two people.
James Provost
On the standards front, we are part of an IEEE working group, P1920.2, developing standards for vehicle-to-vehicle communications. This effort began in 2019. So far, we’ve published three white papers on the use cases, spectrum, and security requirements for eVTOLs in anticipated advanced-air mobility (AAM) scenarios. The working group plans to release the draft standard by the end of 2023. More recently, other standards organizations have joined this effort, including the General Aviation Manufacturers Association and the Radio Technical Commission for Aeronautics.
Our North Texas (NTX) cohort was established in 2020 specifically to advance the technologies of autonomous flight and communications for AAM. The startups in the group are Avianco Technologies, a technology provider for unpiloted aerial vehicles; Hermes Autonomous Air Mobility Solutions, a data-exchange hub; Delmont Systems, an aviation-focused weather forecaster; Metron, a data-analysis firm; and ResilienX, which develops software for monitoring and managing the safety of an airspace. Established companies include Bell, the aerospace manufacturer, and Frequentis, an air-traffic-management service provider. Universities include the University of North Texas, where one of us (Namuduri) works, Texas A&M University at Corpus Christi, and the University of Massachusetts (U. Mass), Amherst. Our funders include, besides NASA, the National Science Foundation, the U.S. Air Force, and the North Central Texas Council of Governments.
The purpose of our demonstration on 11 October 2022 was to fly a helicopter, standing in for an eVTOL, within a simulated, heavily trafficked route for autonomous cargo and passenger-carrying eVTOLs. During the demo we tested emerging AAM technologies, including ones for airspace system automation and advanced communications. The air route connected Hillwood’s Mobility Innovation Zone, in the northern outskirts of Fort Worth, to the Discovery Park on the campus of the University of North Texas, a distance of 60 kilometers (37 miles).
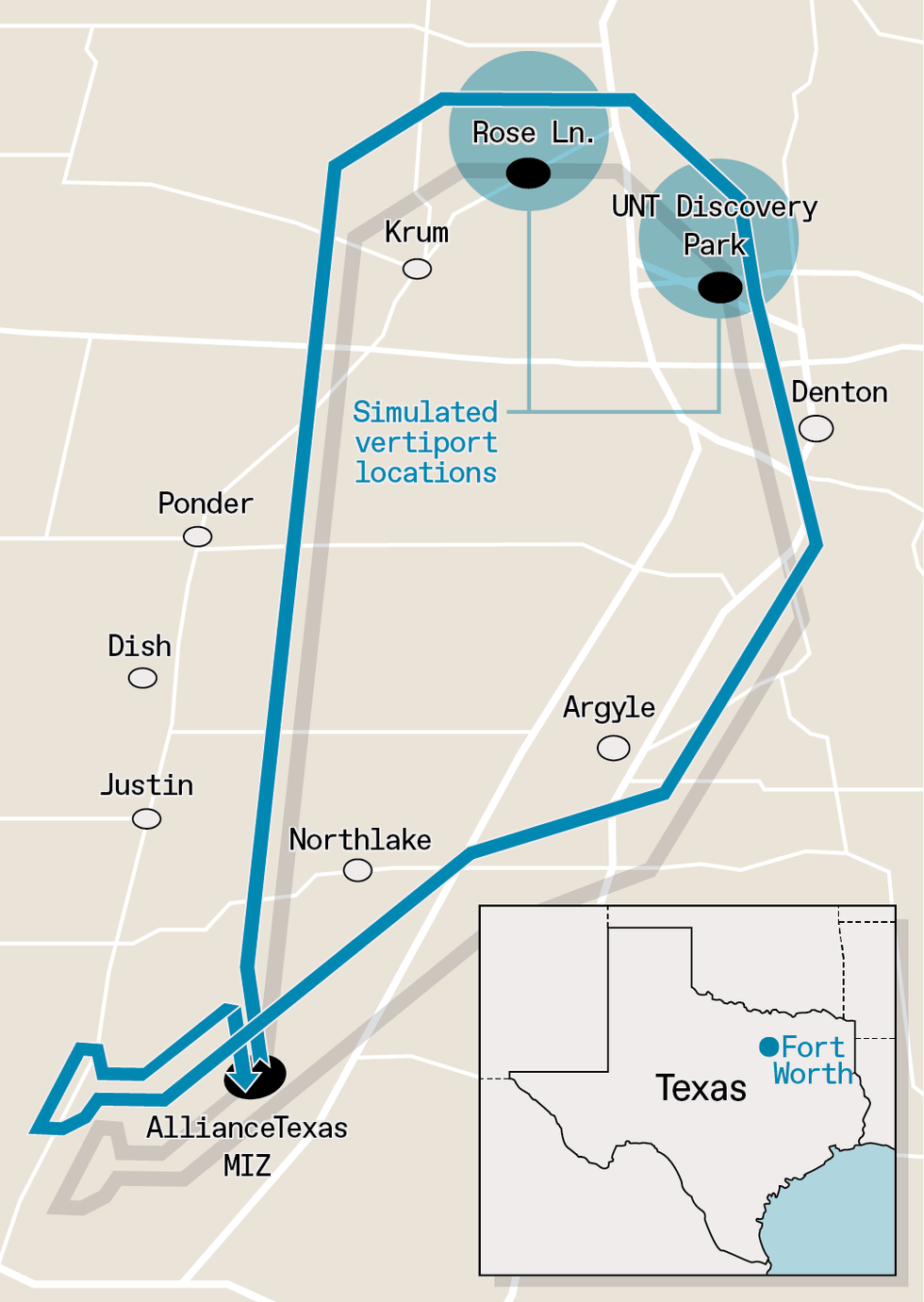 To evaluate communications gear and protocols that could be used to guide future vertical-takeoff aircraft in an urban environment, researchers set up a test corridor in the northern outskirts of Fort Worth, Texas. The air route connected a Mobility Innovation Zone (MIZ) to the Discovery Park on the campus of the University of North Texas, a distance of 60 kilometers. The route included simulated vertiports at the Discovery Park and also at a nearby location called Rose Lane.
To evaluate communications gear and protocols that could be used to guide future vertical-takeoff aircraft in an urban environment, researchers set up a test corridor in the northern outskirts of Fort Worth, Texas. The air route connected a Mobility Innovation Zone (MIZ) to the Discovery Park on the campus of the University of North Texas, a distance of 60 kilometers. The route included simulated vertiports at the Discovery Park and also at a nearby location called Rose Lane. James Provost
Our physical facilities include the Bell helicopter, a mesh network of StreamCaster radios from Silvus Technologies, and a ground-control station (GCS). The radios were placed along the corridor. The GCS includes antennas, computing equipment, and the software necessary to share information between the station and the aircraft, via the mesh radios. All the GCS hardware is installed in a truck provided by Bell Textron.
The immediate goal was to generate vital data that would help us create industry standards in airspace management, vehicle-to-infrastructure communications, and autonomous-flight operations. NASA has been conducting research on these challenges for a few years now, but our trials went beyond the earlier work. In particular, we included live weather data from a network of weather radars monitored by the University of Massachusetts’s CASA CityWarn system. This data was fed into a system that specified the sequence of aircraft takeoffs and landings so that demand for use of the corridor never exceeds its capacity. (For our trial we had only one aircraft—the helicopter—but in a real-world scenario, this sequence would be much more complicated.)
This demand-capacity balancing system was one of several software subsystems developed by our partners in the North Texas Cohort that were deployed as part of the demonstration. These software components are distributed in the cloud and interacted with one another during the demonstrations through industry-standard interfaces. They all performed without incident.
As noted above, for the high-demand routes to work, eVTOLs will need to be in constant contact with a traffic-management system, a capability we intended to demonstrate during the October test. Such uninterrupted communications is necessary not only to organize air traffic but also to ensure the safety and security of the vehicles, people, and property below.
How the test flights unfolded
During our test, the Bell 407GXi helicopter made two laps of the air corridor. Our basic goal for these flights was to demonstrate several autonomous operations, including rerouting in the middle of a flight.

Test flights in October 2022 were conducted to evaluate communications technologies that could be used to guide future vertical-takeoff aircraft in urban settings. For the tests, organizers flew a Bell 407GXi helicopter. Future aircraft will likely be electric.
University of North Texas
In the course of one trip, we had weather-related contingencies, both simulated and real. As the helicopter was preparing to take off from Fort Worth for the first flight, at around 2 p.m. central time on 11 October, we simulated a sudden weather change for the worse. Ironically, in the real world, the weather also soon took a rapid turn for the worse: It started to rain heavily midway through the flight.
Because of the weather changes, both simulated and real, the system commanded the aircraft to follow an alternate route and land at the Rose Lane “vertiport,” instead of the original destination, the University of North Texas “vertiport.” (Neither location has an actual vertiport; the helicopter actually took off and landed at the Fort Worth site.) While in the air, the aircraft sent, on average, three telemetry messages per second.
However, as the helicopter approached the Rose Lane “vertiport” landing zone, the service attempted to alert the aircraft that it could not land there. In the meantime, the weather was cleared on the original, northeastern route. So the onboard computer requested a second rerouting, back to the northeastern route, for a landing at the University of North Texas (UNT) vertiport.
As mentioned, we don’t yet have a vertiport at UNT. So after hovering in the air at a suitable location, the aircraft returned to the Mobility Innovation Zone in Fort Worth, following the same northeastern route in reverse.
The above sequence was repeated twice. During the first lap, the onboard computer communicated with the GCS using an ordinary 4G LTE modem. During the second lap, the onboard computer communicated with the GCS using the mesh network that our team established throughout the flight path.
We still have to clear some substantial technical hurdles before advanced air mobility can become a part of our daily routines.
All the cloud-based software systems for monitoring and controlling the flights worked and interacted with one another perfectly, processing and relaying flight data and handling contingencies. However, we did experience lapses in communication. There were areas where the communication from the aircraft was sporadic. For example, during the first flight, the aircraft did not receive weather-related rerouting requests. Also, telemetry information was sporadic during some segments of both flights.
This experience emphasized the need for establishing a reliable communications infrastructure and the need for redundancy. In the first lap, when the computer onboard the helicopter was communicating with the GCS using 4G wireless, communications quality was weak because the cellular network had not been designed to support drone communications. In the second lap, when the helicopter communicated with the GCS using a mesh network of radios, the quality of communication was better. Nevertheless, one of the radio nodes lost connection to the Internet, causing the system to drop many messages.
So our near-term focus will be on ensuring a uniformly strong connection throughout the route, for both air-to-ground and air-to-air communications. To this end, we are partnering with Galaxy Unmanned Systems and SpectrEdge to minutely test the signal strengths along an entire air corridor. In our next series of trials, we will fly Galaxy’s GC-35-G2A airship. This remotely operated, 11-meter-long, helium-filled airship will scout the air corridor using an RF scanner built by SpectrEdge to identify weak spots in the mesh network.
Our October demonstration in the Fort Worth area is just the first of many North Texas Cohort flight tests to come. We’re now partnering with the Choctaw Nation of Oklahoma to establish an air corridor between the University of North Texas campus in Denton to the Chocktaw reservation, 160 kilometers away. Once established, this air corridor will give us invaluable experience and insights into how to set up future eVTOL routes linking urban and rural or suburban areas.
We still have to clear some substantial technical hurdles before advanced air mobility can become a part of our daily routines. The benefits will be well worth the effort. Imagine air taxis, air ambulances, and cargo vehicles whisking people and goods over our cities and beyond. Sleek eVTOLs will ferry travelers to airports in minutes rather than in an hour or more at rush hour. Lifesaving organs and fluids will get to hospitals by the fastest routes possible. And tourists will get bird’s-eye views once accessible only to the wealthy. We have the technology. What we need to do now is make sure it works—with reliability as extreme as we can possibly make it.
From Your Site Articles
- Air Taxis Are Safe—According to the Manufacturers ›
- I Fly Opener’s BlackFly eVTOL ›
- EVTOL Companies Are Worth Billions—Who Are the Key Players? ›
Related Articles Around the Web
{"imageShortcodeIds":[]}


